Underkapitel 4.2
Robotplockning
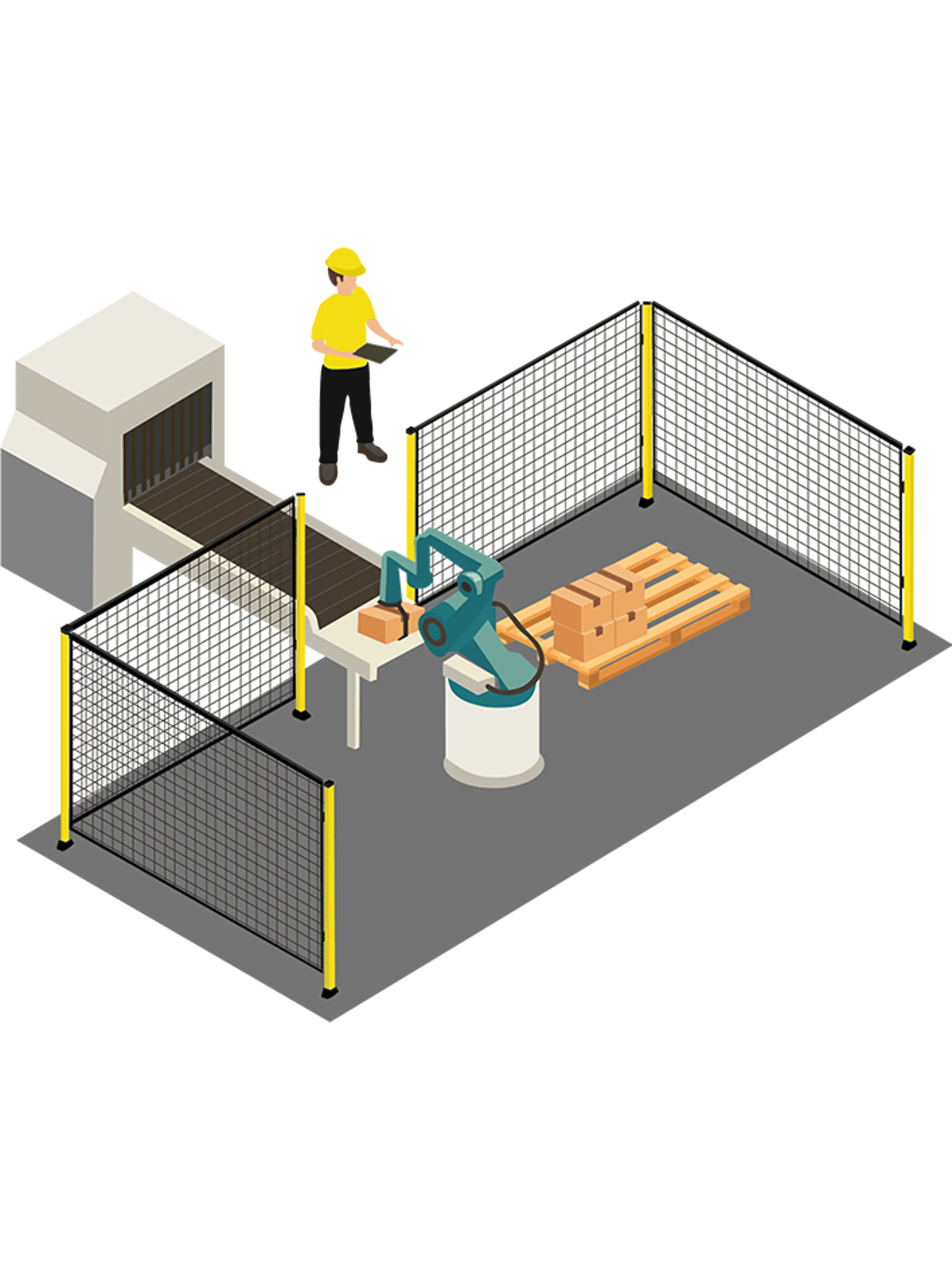
I det här avsnittet hittar du information om vanliga risker i robotplockningsmiljöer och hur du kan minska dem med hjälp av skyddsåtgärder som stängsel, ljusbarriärer och avskiljning av arbetsytor. Avsnittet förklarar också att robotar avsedda för samarbetsdrift behöver extra skyddsåtgärder, särskilt där verktyg eller maskingränssnitt kan skapa oväntade faror.
Typer av robotar som används vid plockning
Robotar används allt oftare för att plocka och placera varor och paket för att slutföra beställningar. De robotar som används kan vara:
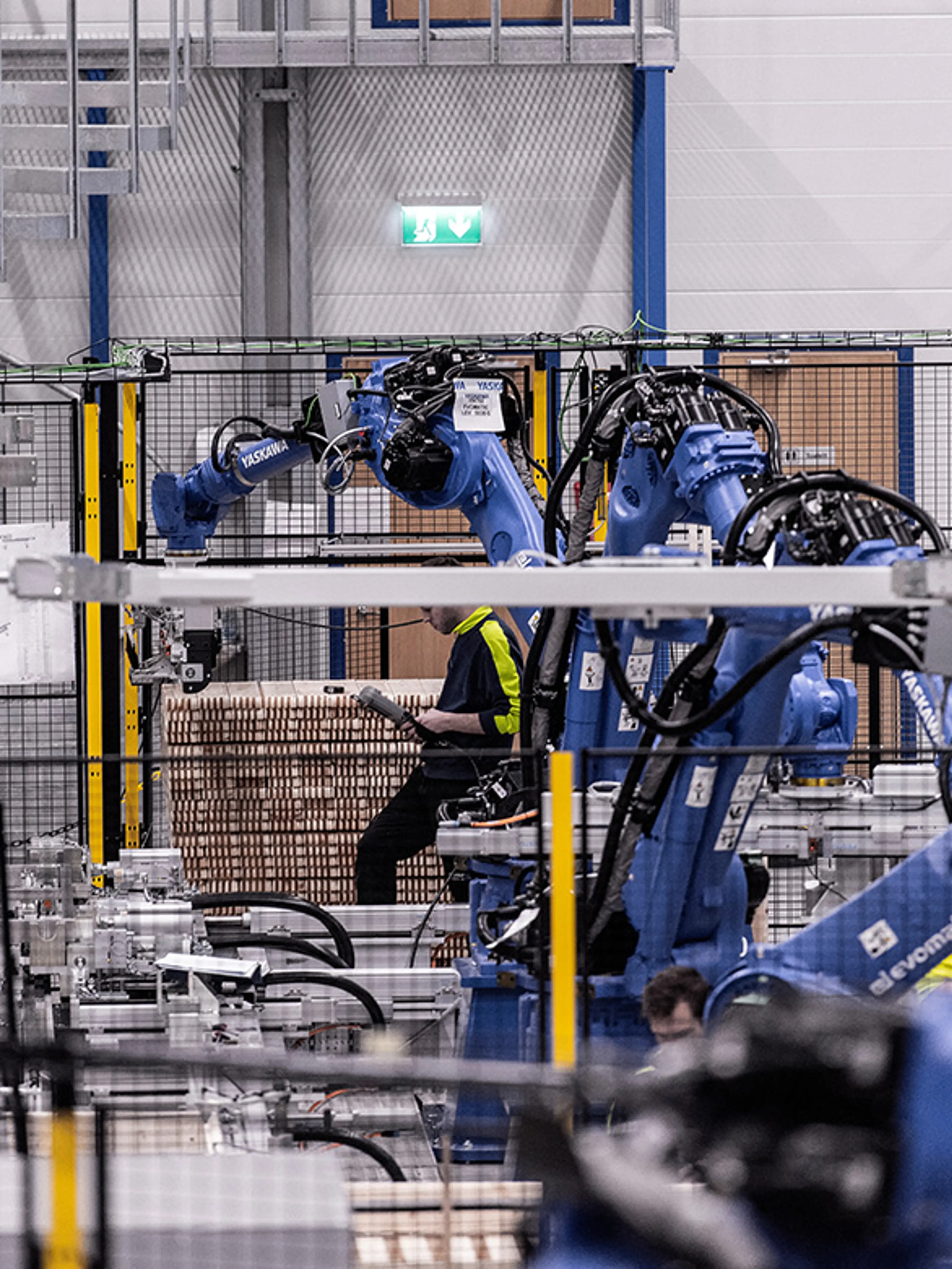
- Industrirobotar som rör sig i hög hastighet och vanligtvis hanterar medelstora till tunga laster.
- Samarbetsrobotar (“cobots”) är konstruerade så att de rör sig med hastigheter och krafter som inte skadar människor vid kontakt eller kollision. Generellt hanterar de lägre laster än industrirobotar. Säkerheten för samarbetsapplikationer måste ändå studeras noggrant eftersom robotens ändeffektor och dess arbetsmiljö kan innebära risker.
Säkerhetsfrågor i robotiserade plockzoner
Även om robotiserade plocksystem erbjuder snabbhet och precision, medför de också säkerhetsutmaningar, särskilt där människor och maskiner arbetar i nära samarbete.
Typen av robot, den omgivande layouten och de verktyg som används påverkar alla riskenivån. Nedan listas några av de vanligaste farorna att vara medveten om.
- Som i alla andra robotapplikationer innebär industrirobotar en hög risk för stötar, krossning, klämning och fallande laster. I befintliga installationer (brownfield) kan dessa risker förvärras av begränsat utrymme.
- Robotar avsedda för samarbetsapplikationer anses vara “säkra”, men robotens ändeffektor samt interaktionen med transportsystem och annan maskinell utrustning kan ändå medföra vissa risker.
Säkerhetsstrategier per robottyp
För att minska risker i robotiserade plockmiljöer måste säkerhetsåtgärder anpassas efter vilken typ av robot som används.
Medan industrirobotar ofta kräver fullständig skyddsanordning, kan även samarbetsrobotar behöva begränsad åtkomst beroende på verktyg och omgivning. Strategierna nedan hjälper till att säkerställa säker och effektiv drift.
Begränsa rörelseområdet för industrirobotar på ett säkert sätt och installera skyddsanordningar.
Använd:
- Skyddsstängsel, ljusbarriärer, laserskannrar eller kontaktmattor
(tillämpa EN ISO 10218-1/-2 eller ANSI/RIA R15.06 i USA).
Begränsa åtkomsten till samarbetsarbetsytor genom fysiska barriärer på sidor som operatörerna inte behöver nå.
Använd:
- Skyddsstängsel om det finns betydande risker från robotens ändeffektor.
- Gångbarriärer eller lägre “varningsbarriärer” för att uppmärksamma människor på områden de inte bör gå in i; detta hjälper också till att störa roboten så lite som möjligt och säkerställa att applikationen fungerar effektivt.
