Underkapitel 4.1
Mobila autonoma maskiner
I detta avsnitt behandlas säkerhetsaspekterna hos industriella mobila robotar (IMR) såsom AGV och AMR. Du får lära dig hur dessa system fungerar, var risker uppstår och vilka inbyggda och ytterligare skyddsåtgärder som rekommenderas för att säkerställa en säker interaktion mellan människor och mobila automatiseringssystem.
Flexibel transport med AGV och AMR
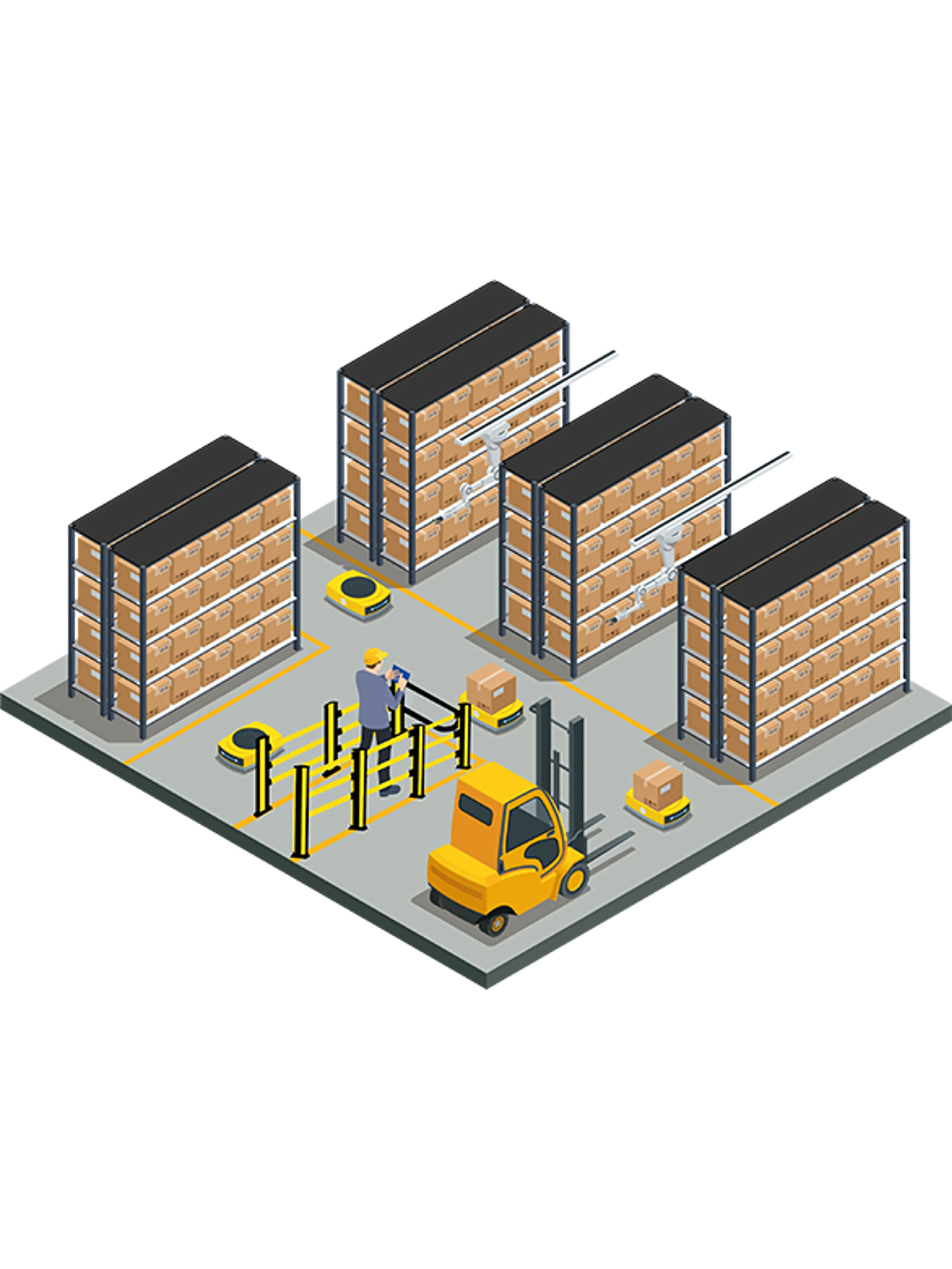
Industriella mobila robotar (IMR), såsom automatiskt styrda fordon (AGV) och autonoma mobila robotar (AMR), kan transportera olika lagringsenheter till/från lagringsplatser.
De kan lyfta, transportera och flytta pallar, hela ställningar eller till och med mycket stora enhetslaster, men används oftast för lådor, behållare och korgar. De används främst i strategier för ”varor till person” för plockning av lådor och enstaka artiklar, men kan också användas för mellanliggande transportuppgifter i ett system för ”person till varor”.

Typiska metoder för lasthantering av IMR:er
Det finns fem huvudsakliga sätt på vilka IMR:er plockar och placerar laster (kombinationer av dessa kan också användas):
- AGV:er som fungerar som obemannade gaffeltruckar som flyttar pallar.
- En robot, ett linjärt hanteringssystem eller ett transportörsystem placerar lasten ovanpå fordonet (sådana fordon kallas ofta för ”undercarts” och kan ha en mycket låg höjd på endast 50 till 300 mm).
- IMR har en transportör på toppen för övertagande; vissa IMR kan teleskopera transportören in i en hylla för att hämta den, och gripdon kan finnas för att underlätta plockning/fastsättning.
- IMR rör sig under en last, lyfter upp den och flyttar den; hela rack kan på så sätt lyftas och flyttas till en orderplockningsarbetsplats och tillbaka till lagret (sådana system kallas ofta ASRS = Automated Storage and Retrieval Systems).
- En robot ovanpå en IMR plockar artiklar, lägger dem i en låda eller på en plattform, transporterar dem och placerar dem sedan på en målplats; sådana IMR kan också ha produktionsfunktioner, såsom rengöring, polering, inspektion etc.
Vanliga risker i IMR-miljöer
IMR är utrustade med avancerade säkerhetsfunktioner, men vissa risker kvarstår, särskilt när människor blir ouppmärksamma eller vänjer sig vid deras närvaro.
I nödsituationer kan mobila robotar också blockera utrymningsvägar. Följande lista beskriver viktiga risker som bör beaktas noggrant vid planering och implementering av IMR-system:
- Kollisionsrisk – påkörning eller överkörning av personer, särskilt där IMR och fotgängare delar utrymme eller när fordon kör in på manuella arbetsplatser.
- Risk för påkörning under fordonet – IMR-fordon med låg höjd kan köra under utrustning eller stängsel om golvspalten är för stor.
- Krossning/skärning mot omgivningen – i trånga utrymmen som ställage, smala gångar, dörröppningar, maskiner eller konstruktionsdelar.
- Risker vid lasthantering – krossning och skärning vid dockning, laddning eller lastöverföring.
- Vältande laster – risk för stötar från instabila eller fallande föremål.
- Lokaliseringfel – olyckor på grund av fel eller felaktig lokalisering, särskilt nära trappor, ramper, lastkajer, döda vinklar etc.
- Avaktiverade sensorer – närvarodetektering kan avbrytas under dockning eller överföring.
- Oupptäckta personer – närvaro av personer i döda vinklar utanför sensorns räckvidd.
- Risker med tilläggsutrustning – faror från verktyg som transportband, gripare eller robotarmar monterade på IMR.

IMR:s säkerhetsfunktioner och standarder
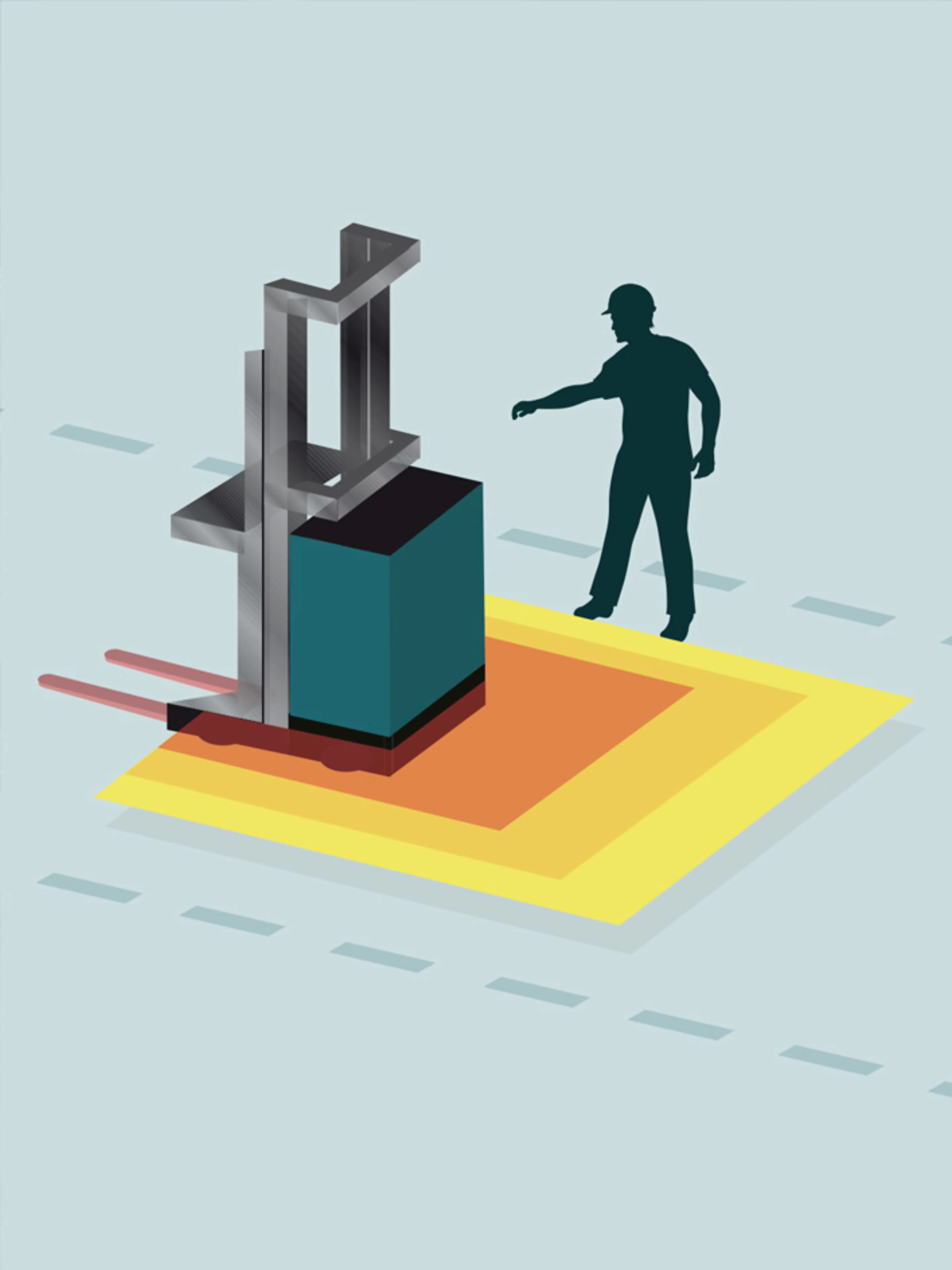
Alla IMR-enheter är utrustade med närvarosensorer som förhindrar olyckor.
Fordonet rör sig i allmänhet långsamt i områden där människor vistas och stannar när det stöter på hinder eller människor i sin väg. De flesta IMR-fordon kan programmeras för att undvika virtuella begränsade och förbjudna zoner, och vissa har dessutom stötfångare som stänger av fordonet vid kollision.
Passiva säkerhetsfunktioner som ingår är nödstoppsknappar, varningslampor och larmsignaler. Säkerhetskraven för AGV:er och IMR:er fastställs i (EN) ISO 3691-4 samt ANSI/RIA R15.08-1 och ANSI/ITSDF 56-5 för USA. Mer information om standarderna finns i kapitel 5.3 Industriella säkerhetsstandarder.
Baserat på detta och med stöd av noggranna riskbedömningar kan följande åtgärder vara nödvändiga för att säkerställa en säker arbetsmiljö.